Scientists have built a bird-inspired robot with legs that can walk on the ground, hop over obstacles and jump into flight, an advance that may lead to the development of drones for complex terrains.
Many lifeforms use the same body parts to perform or assist different forms of movement and have been an inspiration for engineers.
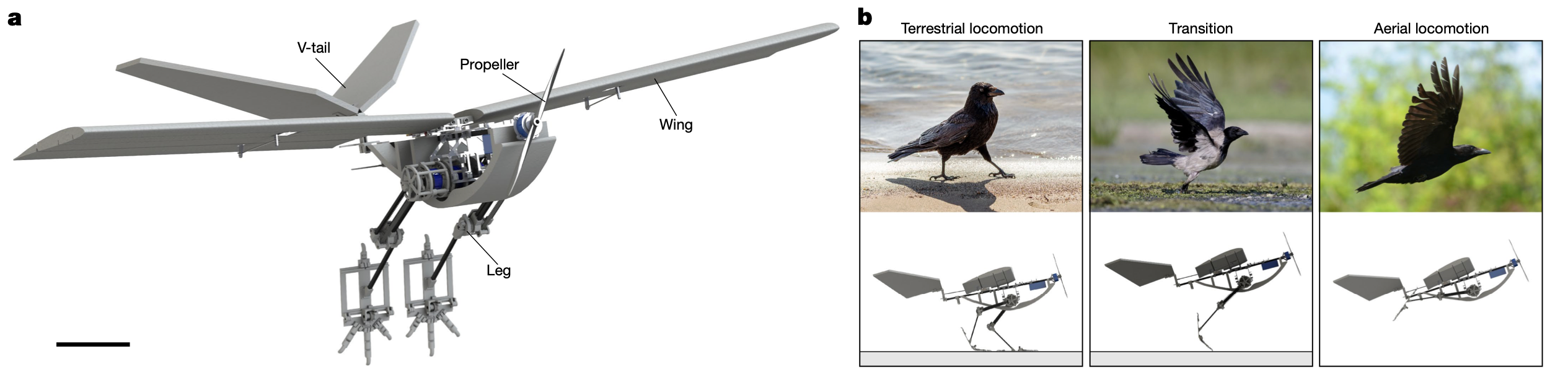
Birds use their hindlimbs for a range of functions such as walking, hopping, leaping, and jumping into flight – capabilities that may be useful for aerial robots and drones.
But creating such a system with multiple modes of locomotion has been a challenge due to the added complexity and weight that could make flight inefficient.
The newly built robot with bird-like limbs overcomes some of these challenges. It is called Raven, short for Robotic Avian-inspired Vehicle for multiple ENvironments.
It has limbs and structures that mimic the hip, ankle and foot of a bird, while being less complex compared to the multisegmented avian anatomy.
In tests, Raven jumped into take-off just like a bird, scientists said.
Researchers used computer simulations to calculate the leg motion and speed needed for Raven to take flight.
Their study, published in the journal Nature on Wednesday, found that by synchronously triggering the robot’s jumping legs and front propeller, Raven could transition to flight mode quickly and automatically.
“The robot could achieve the desired take-off speed of approximately 2.4 metres per second, which is comparable to birds of similar body mass,” scientists said.
The new design contributes “substantially” to the flight take-off speed, researchers said, and can be more energy efficient than robots that take off without a jump.
The new leg design enabled the robot to perform a range of movements like walking, hopping over a gap, and jumping onto an obstacle.
Raven’s jumping legs also allowed it to start flight at a height of about 0.4 m, helping overcome potential ground obstacles, the study found.
The jumping strategy, according to scientists, “allowed the drone to take off in a wider range of circumstances and at higher initial speed, thus leading to a more stable take-off”.
With further optimisation, researchers said Raven’s leg design could inspire the development of more versatile robots with multiple locomotion modes.
The study could pave the way for more versatile machines that use multiple movement modes while minimising efficiency trade-offs, scientists said.






