Scientists have designed a robot that they claim could one day jump 400 feet (120 meters) — high enough to clear the Statue of Liberty in a single bound. It could even leap as high as 650 feet (200 m) on the moon.
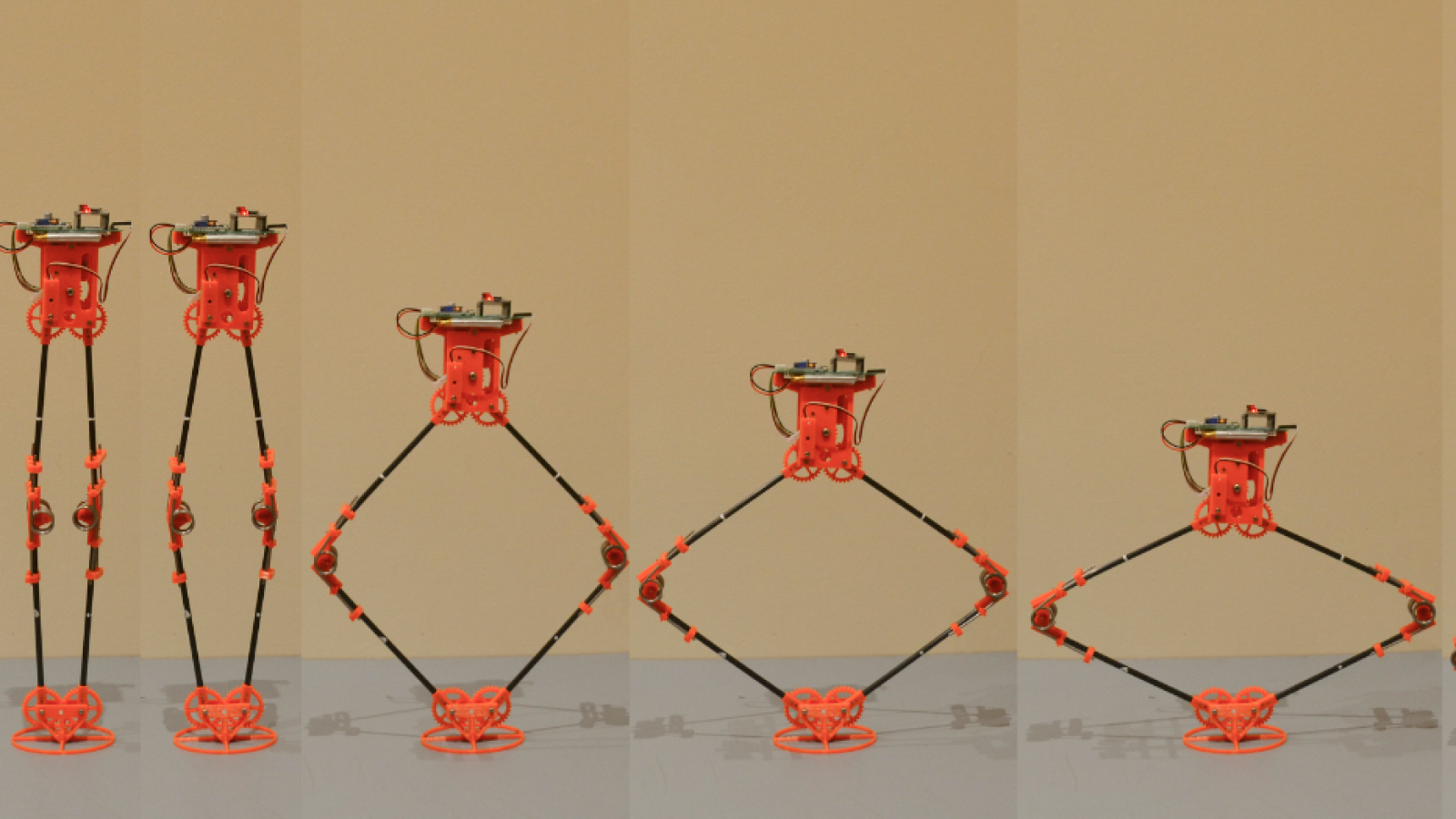
The high-jumping robot is designed for exploring difficult terrain that conventional robots would struggle to traverse, such as cave systems, forests and potentially other planets. It features unique prism-shaped legs with stretchable springs designed to maximize the transfer of elastic energy into kinetic energy during a jump.
The researchers said their design could enable robots to jump to heights many times their own size, and more than six times higher than the current record. They published their findings May 24 in the journal Mechanism and Machine Theory.
To demonstrate their design theory, the scientists built a 15.7 inch (40 cm) tall robot that could jump more than 5 feet (1.6 m) in the air.
"While jumping robots already exist, there are several big challenges in the design of these jumping machines, the main one being to jump high enough to overcome large and complicated obstacles," study co-author John Lo, a research associate in space robotics at the University of Manchester, said in a statement. Our design would dramatically improve the energy efficiency and performance of spring-driven jumping robots."
Related: Watch a 'robot dog' scramble through a basic parkour course with the help of AI
Conventional robots are typically equipped with wheels or, in the case of machines like Boston Dynamics' Atlas and Spot, two or four legs. While these designs work well on simple terrain, they aren't adept at tackling obstacles like cliffs, or steep and uneven surfaces. This is where a jumping design comes in handy.
One giant leap for robotkind
Jumping robots typically use motors to store energy in a spring, and then release this energy to propel the robot upwards. Power amplification — a mechanism seen in animals like fleas and locusts whereby stored elastic energy is converted to kinetic energy — enables springs to generate greater output power than standalone motors, resulting in higher jumps.
Previous jumping robot designs have incorporated power amplification, but they are prone to taking off before their spring energy is fully released, the scientists said, meaning their stored elastic energy is not fully converted into kinetic energy. These robots also tend to waste energy by moving side to side or rotating, instead of jumping straight upwards.
"There were so many questions to answer and decisions to make about the shape of the robot, such as, should it have legs to push off the ground like a kangaroo, or should it be more like an engineered piston with a giant spring?" co-author Ben Parslew, a senior lecturer in aerospace engineering at the University of Manchester, said in the statement.
To find out which design type would be best, the scientists examined two robot models: one with a straight-line "prismatic" system and one with a rotational system.
In the prismatic model, the robot's legs moved in a piston-like motion, similar to a pogo stick. However, the extra weight at the bottom of the robot created an inertial effect, meaning the spring couldn’t fully extend before the robot left the ground.
The rotational model, meanwhile, featured legs that moved in a circular motion, similar to a kangaroo’s. In this model, the spinning motion of the legs caused the robot to leave the ground before the springs had fully released their stored energy — again, reducing the height and effectiveness of the jump.
To address these issues, the team combined the best of both designs. By shifting most of the robot’s weight to the top and making the bottom lighter and more streamlined, they were able to improve its stability and energy efficiency. Likewise, by using straight-moving prismatic legs with springs that extended linearly, the scientists were able to mitigate the issue of delayed or premature take-offs.
Work is now underway to control the direction of the jumps and harness the kinetic energy generated when the robot lands, which could be used to increase the number of jumps it can do on a single charge, the scientists said. The team will also explore more compact designs suitable for space missions.