Robotic vehicles can optimize the flow of traffic in cities even when mixed in with vehicles driven by humans, thereby improving traffic efficiency, safety and energy consumption, my colleagues and I found.
Robot vehicles are no longer a sci-fi concept: Cities around the world have been testing autonomous robotaxis since 2016. With the increasing presence of robot vehicles in traffic and the foreseeable long period of transitioning from mixed traffic to fully autonomous traffic, my team and I wondered whether robot vehicles and their interactions with human-driven vehicles can alleviate today’s notorious traffic problems.
I am a computer scientist who studies artificial intelligence for transportation and smart cities. My colleagues and I hypothesized that as the number of robot vehicles in traffic increases, we can harness AI to develop algorithms to control the complex mixed traffic system. These algorithms would not only enable all vehicles to travel smoothly from point A to point B but, more importantly, optimize overall traffic by allowing robot vehicles to affect vehicles driven by people.
To test our hypothesis, we used a branch of AI known as reinforcement learning, in which an intelligent agent learns to maximize cumulative rewards through interaction with its environment. By setting rewards for simulated robot vehicles to prioritize goals such as traffic efficiency or energy consumption, our experiments show that we can effectively manage mixed traffic at complex real-world intersections under real-world traffic conditions in simulation.
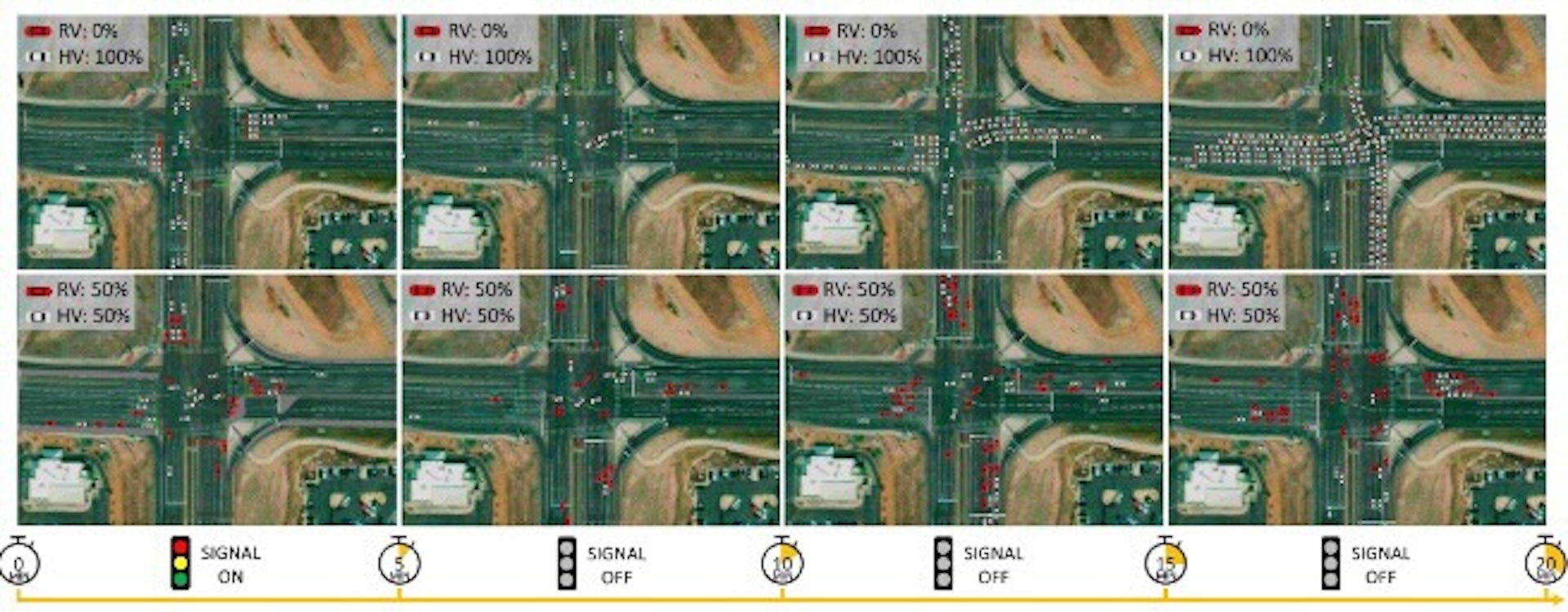
Our algorithm teaches the robocars to optimize traffic flow by communicating with each other. The collective system of cars aims for smooth traffic flow even as each individual car decides when to enter an intersection based on its immediate environment. Because the robocars are dispersed among cars driven by people, all traffic is affected by the algorithm.
We found that when robot vehicles make up just 5% of traffic in our simulation, traffic jams are eliminated. Surprisingly, our approach even shows that when robot vehicles make up 60% of traffic, traffic efficiency is superior to traffic controlled by traffic lights.
Why it matters
Traffic is worsening in every major city across the globe, leading to significant economic and environmental costs. It is one of the most challenging problems society faces today. Current traffic control methods, such as traffic lights, have limited effectiveness in reducing delays and congestion.
AI-driven robot vehicles offer a potential solution, but existing studies often assume universal connectivity and centralized control of all robot vehicles, a scenario that is not likely to materialize anytime soon. The transition to fully autonomous traffic is likely to be gradual, resulting in a prolonged period of mixed traffic with both robot and human-driven vehicles.
This led us to develop control algorithms that use robotic vehicles to harness the societal benefits of autonomous transportation systems without requiring all or even a majority of vehicles to be autonomous.
What other research is being done
Recent studies have demonstrated the potential of mixed traffic control in scenarios such as ring roads, figure-eight roads, highway bottlenecks and merges, two-way intersections, and roundabouts. However, these scenarios typically lack real-world complexity and only involve a limited number of vehicles that need to be coordinated.
Our work is the first to demonstrate the feasibility of controlling mixed traffic via robot vehicles at real-world, complex intersections. Being able to control traffic at these intersections is an essential step toward citywide traffic control.
What’s next
We plan to expand our framework to incorporate additional driving behaviors for robot vehicles, such as frequent lane-changing. We also plan to test our approach on a variety of intersection types, and we want to test our approach under real-world vehicle-to-vehicle communications.
Ultimately, our goal is to achieve effective and efficient mixed traffic control at the scale of cities.
The Research Brief is a short take on interesting academic work.
This article was originally published on The Conversation by Weizi Li at University of Tennessee. Read the original article here.