
NASA is building a roadmap for robots that could visit ocean worlds through future space missions and crack the worlds' thick, icy shells to explore subsurface seas in search of life.
Recently, the space agency revealed results from a NASA-sponsored workshop held in Feb. 2023 at which scientists and engineers gathered to discuss possible "cryobot" mission concepts. The idea is to crack through the icy exteriors of solar system moons, like Jupiter's moon Europa or Saturn's moon Enceladus, and drop a probe within that can explore the underlying liquid ocean.
The cryobot concept explored is an alternative to simply drilling into a world, and involves using a cylindrical device dispatched from a mother unit at the surface of an icy ocean world that can melt ice and therefore slip down as water flows around it and refreezes.
These probes, and this so-called "thermal drilling" technique, are currently commonly employed to investigate glaciers and ice caps on Earth, but the icy shells of worlds like Europa and Enceladus are colder and thicker. They also present behaviors that are far less predictable.
Parlaying current terrestrial thermal drilling operations into extraterrestrial environments via cryobots has been the focus of researchers supported by NASA's Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) and Concepts for Ocean worlds Life Detection Technology (COLDTech) programs for several years.
Related: Icy Water Moons That Might Host Life (Infographic)
Over this time, however, humanity has learned much more about ice-capped ocean worlds, and thus, the workshop, held at the California Institute of Technology (Caltech), offered the chance for scientists involved in these projects to reconvene and ensure these developments are being factored into robot mission architecture.
To find life, follow the water
Life as we know it is dependent on many key compounds, molecules and elements, but arguably, none are as vital as water is.
A fundamental building of life here on Earth, it is easy to see why water has become the focus for scientists aiming to search for life elsewhere in the solar system. And, while we have discovered that water is abundant in our stellar backyard (and even beyond), no discovery has been more tantalizing to astrobiologists than the realization that icy moons in our own solar system harbor vast oceans of liquid water.
The discovery that the arid landscape of Mars once overflowed with water offers the inarguably exciting opportunity to discover remains of ancient life, but ocean moons like Europa and Enceladus offer the chance to discover worlds that are currently habitable and may even host actual living things in their waters right now. Those living things, though they'd likely be microbial, would be revolutionary to find.
According to NASA, the Caltech workshop led to the identification of four key aspects that should inform the roadmap for the development of an alien-water-world-exploring robot. Those aspects were power, thermal capability, mobility and communication.
A bot that can bring the heat under pressure
Of course, the miles-thick icy shells of our ocean world muses constitute considerable challenges to missions that seek to search for life. That means the heart of an ocean world exploring cryobot would need a nuclear power system that is capable of providing heat that can melt through those many miles of ice — a system that's estimated to need around 10 kiloWatts (kW) of energy. This system would also have to be integrated into a structure that can survive the immense pressure of these deep alien seas.
There is some precedence in developing such a system, however complex it may sound..
The Cassini spacecraft, which explored Saturn and its moons before plunging into the gas giant's atmosphere in 2017, carried a thermal power system capable of generating 14 kW — more than the energy needed to melt through miles of ice. Also, during the 1960s and 1970s, Radioisotope Thermoelectric Generators (RTGs) that could probably survive the pressures of Europa's oceans were deployed to the bottom of oceans here on Earth.
But the futuristic cryobot wouldn't just need protection from its environment; it would also need to be protected from the heat it generates itself. This would require a thermal management system that can maintain a safe internal temperature for the bot by distributing heat to the environment.
One way of doing this, scientists say, is by using two independently pumped circuits of fluid. One would circulate an internal working fluid through channels embedded in the skin of the robot, and the other would circulate melted ice water between the cryobot and the surrounding environment.
While systems like this have been produced already, much more development is needed to prepare them for the ice shells of Europa or Enceladus.
Those ice shells may also contain impurities such as rock and salt that a robot would need additional systems to penetrate. This could be done using mechanical cutting, by blasting those impurities with high-pressure jets of water, or even by using a combination of the two.
Of course, some obstacles, like large and solid rocks, salt blocks, pockets of water, or even vast voids in these icy shells could be irremovable by these methods — so, a cryobot would also need to be able to navigate its passage to subsurface oceans. This would entail integrating a downward-facing sensor to observe the obstacles as well as a steering system, both of which have been developed in the past but are yet to be fully integrated into any sort of working system here on Earth.
Scientists will also have to devise ways to better identify obstacles in ice shells prior to developing a mission embarking to an icy ocean moon, something the workshop identified as a high priority. The forthcoming Europa Clipper mission, set to launch in2024 and arrive at the icy Jovian moon of Europa in 2030, could be integral in this hazard-investigation work.
Breaking the ice but not communication
Last but not least, the other primary robot mission aspect discussed at the Caltech workshop was a communication system that would allow vital data to be ferried back from a deep-diving, sea-exploring probe to a mother hub unit sitting atop the ice of targeted ocean worlds.
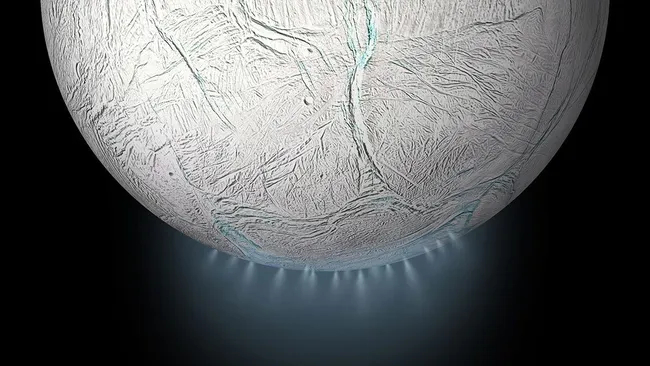
On Earth, cryobots do this using fiber optic cables, but deploying these through ice on an alien world would require being certain that this ice doesn't break the cable. This is something that would be especially challenging in the active ice shell of Enceladus, which may shift and move as plumes of ocean material erupt through fissures, spraying into the moon's atmosphere.
Kate Craft of John Hopkins Applied Physics Laboratory (JPL) is investigating how ice shears on ocean moons could impact a system of communications tethers embedded in ice, while other teams are looking at non-physical methods of data transmission such as the use of radio frequencies, acoustics and even magnetic fields to transmit data from oceans through the alien ice to the surface.
While these were the four key elements of ocean world exploring cryobots discussed by the around 40 attendees of this workshop, other things were looked at, such as instruments that can sample and analyze collected liquids, ice anchoring systems to secure surface-based modules, and materials to coat the surface of the cryobot that won’t corrode in alien environments.
The overall outcome of the mission planning exercise was that there is a great deal of work to be done, but a cryobot mission to icy solar system worlds is feasible.
This ultimately means that finding life on other worlds is more plausible than ever before.






